A concept drawing of what eventually became Valkyrie, Johnson Space Center's entry in the DARPA Robotics Challenge. Credit: NASA, via DARPA.
Here’s a new DARPA-inspired, NASA-built robot, complete with a glowing NASA Meatball in its chest, reminiscent of ET’s heart light. The robot’s name is Valkyrie and she was created by a team at the Johnson Space Center as part of the DARPA Robotics Challenge, a contest designed to find the life-saving robot of the future. While NASA’s current robot — Robonaut 2 – is just now getting a pair of legs, “Val” (officially named “R5″ by NASA) is a 1.9 meter tall, 125 kilogram, (6-foot 2-inch, 275-pound) rescue robot that can walk over multiple kinds of terrain, climb a ladder, use tools, and even drive.
According to an extensive article about the new robot in IEEE Spectrum, “This means that Valkyrie has to be capable of operating in the same spaces that a person would operate in, under the control of humans who have only minimal training with robots, which is why the robot’s design is based on a human form.”
Why is NASA building more robots? The thinking is that NASA could send human-like robots to Mars before they send humans. Right now, Valkyrie is not space-rated, but the team at JSC is just getting started.
She’s loaded with cameras, LIDAR, SONAR, is strong and powerful, and is just a great-looking robot.
“We really wanted to design the appearance of this robot to be one that was, when you saw it you’d say, wow, that’s awesome.” Nicolaus Radford, Project and Group Lead at the Dexterous Robotics Lab and JSC.
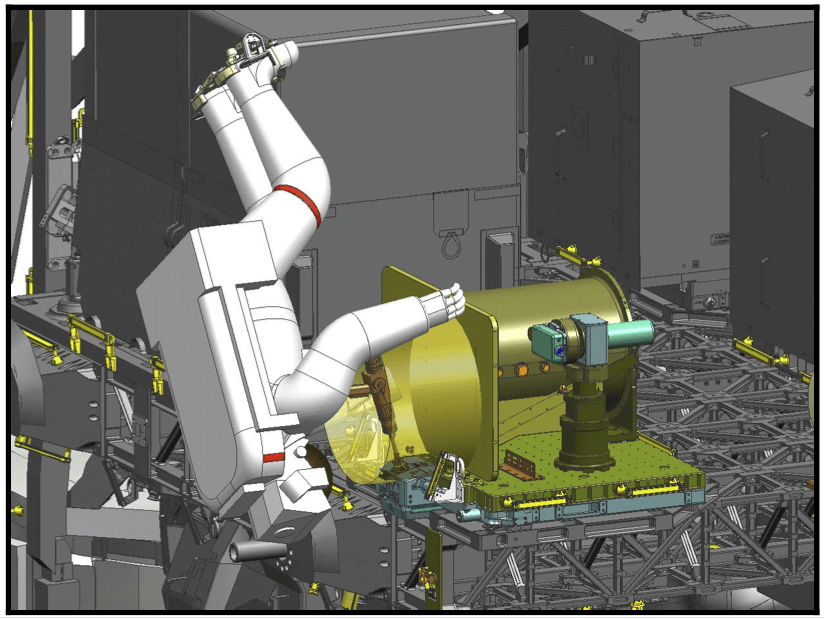
Artist's conception of an astronaut installing the Optical PAyload for Lasercomm Science (OPALS) experiment, which will be installed on the Earth-facing side of the International Space Station. Credit: NASA
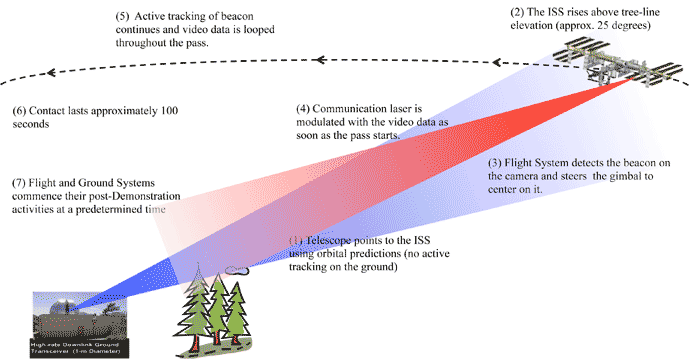
Videos will beam to Earth on a laser beam in a technology demonstration coming to the International Space Station soon, says NASA’s Jet Propulsion Laboratory.
The Optical PAyload for Lasercomm Science (OPALS) plans to move videos from space to an Optical Communications Telescope Laboratory in Wrightwood, Calif. Each demonstration test will last about 100 seconds, while the station and the ground receiver can “see” each other.
While the experiment sounds awesome for sending back “home videos” from space, NASA is more touting it as a boon for transferring loads of scientific data back to Earth.
“The scientific instruments in near-Earth and deep-space missions increasingly require higher communication rates to transmit their gathered data back to Earth or to support high-data-rate applications (e.g., high-definition video streams),” stated the OPALS webpage at NASA’s Jet Propulsion Laboratory.
“Optical communications (also referred to as ‘lasercomm’) is an emerging technology wherein data is modulated onto laser beams, which offers the promise of much higher data rates than what is achievable with radio-frequency (RF) transmissions.”
How the Optical PAyload for Lasercomm Science (OPALS) experiment will work on the International Space Station. Credit: NASA
The experiment page (last updated in May) says it is intended to work for about a year, with the current Expedition 37/38 and forthcoming 39/40 crews. That said, it appears the payload is not aboard station yet.
A July update from NASA said the SpaceX Dragon spacecraft is supposed to ferry OPALS to space. There hasn’t been a Dragon flight since that time, but SpaceX is listing one more for 2013 on its launch manifest.
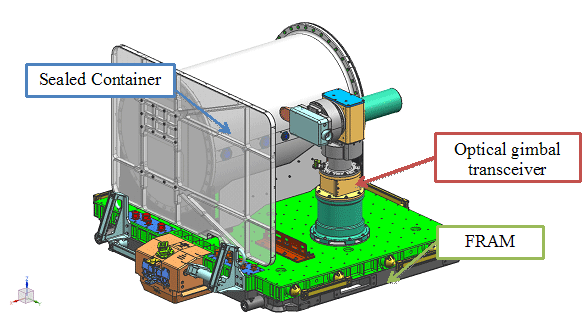
Diagram of the Optical PAyload for Lasercomm Science (OPALS) experiment. It includes three elements: (1) a sealed container that includes the laser, a power board and avionics (2) an optical gimbal transceiver that has an uplink camera, and laser collimater for downlink (3) a Flight Releasable Attachment Mechanism (FRAM), a mechanical and electrical link to the International Space Station and launch vehicle. Credit: NASA
Laser communication hit headlines earlier this fall when the NASA Lunar Atmosphere and Dust Environment Explorer (LADEE) sent a packet of information by laser from the moon, breaking records in terms of download rate (622 megabits per second).
Almost every part of a rocket is destroyed during the launch and re-entry into the Earth’s atmosphere. This makes spaceflight really expensive. Rocket delivery of even a single kilogram into orbit costs tens of thousands of dollars. But what if we could just place our payloads directly into orbit, and didn’t need a rocket at all?
This is the idea of a space elevator, first envisioned by the Russian rocket scientist Konstantin Tsiolkovsky in 1895. Tsiolkovsky suggested building a tower all the way up to geostationary orbit, this is the point where a satellite appears to hang motionless in the sky above the Earth. If you could carry spacecraft all the way up to the top, and release them from that tower they’d be in orbit, without the expense of a discarded rocket. A fraction more energy and they’d be traveling away from the Earth to explore the Solar System.
The major flaw with this idea is that the entire weight of the tower would be compressing down on every part below. And there’s no material on Earth, or in the Universe, that can handle this kind of compressive force. But the idea still makes sense.
Newer thinking about space elevators propose using a cable, stretched out beyond geostationary orbit. Here the outward centripetal force counters the force of gravity, keeping the tether perfectly balanced. But now we’re dealing with the tensile strength of a cable tens of thousands of kilometers long.
Imagine the powerful forces trying to tear it apart. Until recently, there was no material strong enough to withstand those forces, but the development of carbon nanotubes has made the idea more possible.
How would you build a space elevator? The most reasonable idea would be to move an asteroid into geostationary orbit – this is your counterbalance. A cable would then be manufactured on the asteroid, and lowered down towards the Earth.
As the cable extends down, the asteroid is orbited further from the Earth, keeping everything in balance. Finally, the cable reaches the Earth’s surface and is attached to a ground station.
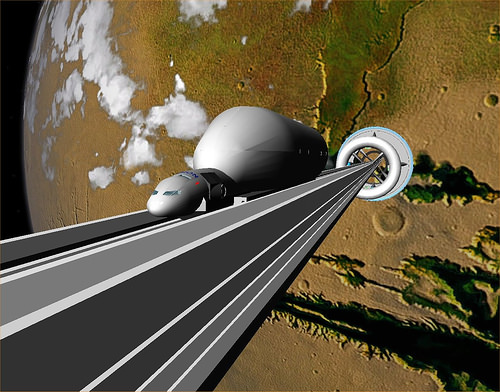
Artists concept of a space elevator. Credit: Caltech
Solar powered machines are attached to the space elevator and climb up from the surface of the Earth, all the way to geostationary orbit. Even traveling at a speed of 200 km/hour, it would take the climber almost 10 days to make the journey from the surface to an altitude of 36,000 kilometers. But the cost savings would be dramatic.
Currently, rockets cost about $25,000 per kilogram to send a payload to geostationary orbit. A space elevator could deliver the same payload for $200 per kilo.
Obviously there are risks associated with a megastructure like this. If the cable breaks, portions of it would fall to Earth, and humans traveling up in the elevator would be exposed to damaging radiation in the Earth’s Van Allen belts.
Building a space elevator from Earth is at the very limits of our technology. But there are places in the Solar System which might make much more useful places to build elevators.
The Moon, for example, has a fraction of the Earth’s gravity, so an elevator could operate there using commercially available materials. Mars might be another great place for a space elevator.
Whatever happens, the idea is intriguing. And if anyone does build a space elevator, they will open up the exploration of the Solar System in ways that we can’t even imagine.
Screengrab from the WildCat video from Boston Dynamics.
This is both wonderful and terrifying. A DARPA-funded four-legged robot named WildCat is being developed by a company called Boston Dynamics (tagline of “Changing Your Idea of What Robots Can Do”). They’ve previously developed a humanoid capable of walking across multiple terrains called Atlas, and the scarily-fast Cheetah which set a new land-speed record for legged robots. But the WildCat is a brand new robot created to run fast on all types of terrain, and so far its top speed has been about 16 mph on flat terrain using both bounding and galloping gaits.
The video, released yesterday, shows WildCat’s best performance so far. Don’t let the sound fool you — yes, it does sound like a weed-whacker. But as soon as it raises up off its haunches, you know you’re doomed.
I’ve been trying to figure out what sci-fi equivalent might describe it best: the Terminator’s pet? A lethal, non-fuzzy Daggit from Battlestar Galactica? An AT-AT Walker on speed?
Astrobotic's model rover explores a mine on Earth to train for lunar lava tunnels (Video screenshot)
Ever since (and most likely long before) the first tantalizing glimpses of a lunar lava tube and skylight were captured by Japan’s Kaguya spacecraft in 2009, scientists have been dreaming of ways to explore inside these geological treasures. Not only would they provide valuable information on the movement of ancient lunar lava flows, but they could also be great places for future human explorers to set up camp and be well-protected from dangerous solar and cosmic radiation.
But before human eyes will ever peer into the darkness of a lava tube on the Moon, robotic rovers will roll along their silent floors — at least, they will if Google Lunar XPRIZE competitor Astrobotic has anything to say about it.
Last month, engineer and Astrobotic CEO Dr. Red Whitttaker talked to NASA about why they want to explore a Moon cave and the history and progress of their project. Check it out below:
“Something so unique about the lava tubes is that they are the one destination that combines the trifecta of science, exploration, and resources.”
– Dr. William “Red” Whittaker, CEO Astrobotic Technology, Inc.
The international Google Lunar XPRIZE aims to create a new “Apollo” moment for a new generation by driving continuous lunar exploration with $40 million in incentive-based prizes. In order to win, a private company must land safely on the surface of the Moon, travel 500 meters above, below, or on the lunar surface, and send back two “Mooncasts” to Earth… all by Dec. 31, 2015.
Astrobotic Technology Inc. is a Pittsburgh-based company that delivers affordable space robotics technology and planetary missions. Spun out of Carnegie Mellon University’s Robotics Institute in 2008, Astrobotic is pioneering affordable planetary access that promises to spark a new era of exploration, science, tourism, resource utilization and mining. (Source)
SpaceX SuperDraco inconel rocket chamber w regen cooling jacket emerges from EOS 3D metal printer. Via Elon Musk on Twitter.
We knew SpaceX CEO Elon Musk was powerful, but now he’s gone all Ironman on us. Last week on Twitter he posted a teaser, saying, “Will post video of designing a rocket part with hand gestures & immediately printing in titanium.”
And now, here it is.
“I believe we’re on the verge of a major breakthrough in design and manufacturing,” says Musk in the video, “in being able to take a concept of something from your mind and translate into a 3-D object intuitively on the computer, then make that virtual 3-D object real just by printing it. It’s going to revolutionize manufacturing and design in the 21st century.”
See a montage of images of a SuperDraco rocket part made of Inconel-X, an austenitic nickel-chromium-based superalloy, emerge from a 3-D printer:
Musk and his design team have been working on using natural gesture-based interaction with a computer-aided design program called Leap Motion, allowing designers to work quickly to create parts, and then equally as quick, use 3-D printing in a metal superalloy to create the part.
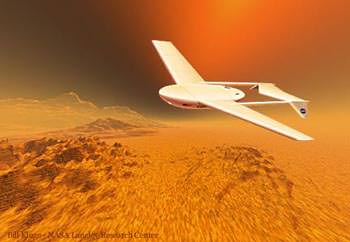
Building a flying vehicle for Mars would have significant advantages for exploration of the surface. However, to date, all of our surface exploring vehicles and robotic units on Mars have been terrestrial rovers. The problem with flying on Mars is that the Red Planet doesn’t have much atmosphere to speak of. It is only 1.6% of Earth air density at sea level, give or take. This means conventional aircraft would have to fly very quickly on Mars to stay aloft. Your average Cessna would be in trouble.
But nature may provide an alternative way of looking at this problem.
The fluid regime of any flying (or swimming) animal, machine, etc. can be summarized by something called the Reynolds Number (Re). The Re is equal to the characteristic length x velocity x fluid density, divided by the dynamic viscosity. It is a measure of the ratio of inertial forces to viscous ones. Your average airplane flies at a high Re: lots of inertia relative to air stickiness. Because the Mars air density is low, the only way to get that inertia is to go really fast. However, not all flyers operate at high Re: most flying animals fly at much lower Re. Insects, in particular, operate at quite small Reynolds numbers (relatively speaking). In fact, some insects are so small that they swim through the air, rather than fly. So, if we scale up a bug-like critter or small bird just a bit, we might get something that can move in the Martian atmosphere without having to go insanely fast.
A potential design of an ‘Entomopter’ from Georgia Tech Research InstituteWe need a system of equations to constrain our little bot. Turns out that’s not too tough. As a rough approximation, we can use Colin Pennycuick’s average flapping frequency equation. Based on the flapping frequency expectations from Pennycuick (2008), flapping frequency varies roughly as body mass to the 3/8 power, gravitational acceleration to the 1/2 power, span to the -23/24 power, wing area to the -1/3 power, and fluid density to the -3/8 power. That’s handy, because we can adjust to match Martian gravity and air density. But we need to know if we are shedding vortices from the wings in a reasonable way. Thankfully, there is a known relationship, there, as well: the Strouhal number. Str (in this case) is flapping amplitude x flapping frequency divided by velocity. In cruising flight, it turns out to be pretty constrained.
Our bot should, therefore, end up with a Str between 0.2 and 0.4, while matching the Pennycuick equation. And then, finally, we need to get a Reynolds number in the range for a large living flying insect (tiny insects fly in a strange regime where much of propulsion is drag-based, so we will ignore them for now). Hawkmoths are well studied, so we have their Re range for a variety of speeds. Depending on speed, it ranges from about 3,500 to about 15,000. So somewhere in that ballpark will do.
There are a few ways of solving the system. The elegant way is to generate the curves and look for the intersection points, but a fast and easy method is to punch it into a matrix program and solve iteratively. I won’t give all the possible options, but here’s one that worked out pretty well to give an idea:
Mass: 500 grams
Span: 1 meter
Wing Aspect Ratio: 8.0
This gives an Str of 0.31 (right on the money) and Re of 13,900 (decent) at a lift coefficient of 0.5 (which is reasonable for cruising). To give an idea, this bot would have roughly bird-like proportions (similar to a duck), albeit a bit on the light side (not tough with good synthetic materials). It would, however, flap through a greater arc at higher frequency than a bird here on Earth, so it would look a bit like a giant moth at distance to our Earth-trained eyes. As an added bonus, because this bot is flying in a moth-ish Reynolds Regime, it is plausible that it might be able to jump to the very high lift coefficients of insects for brief periods using unsteady dynamics. At a CL of 4.0 (which has been measured for small bats and flycatchers, as well as some large bees), the stall speed is only 19.24 m/s. Max CL is most useful for landing and launching. So: can we launch our bot at 19.24 m/s?
For fun, let’s assume our bird/bug bot also launches like an animal. Animals don’t take off like airplanes; they use a ballistic initiation by pushing from the substrate. Now, insects and birds use walking limbs for this, but bats (and probably pterosaurs) use the wings to double as pushing systems. If we made our bots wings push-worthy, then we can use the same motor to launch as to fly, and it turns out that not much push is required. Thanks to the low Mars gravity, even a little leap goes a long way, and the wings can already beat near 19.24 m/s as it is. So just a little hop will do it. If we’re feeling fancy, we can put a bit more punch on it, and that’ll get out of craters, etc. Either way, our bot only needs to be about 4% as efficient a leaper as good biological jumpers to make it up to speed.
These numbers, of course, are just a rough illustration. There are many reasons that space programs have not yet launched robots of this type. Problems with deployment, power supply, and maintenance would make these systems very challenging to use effectively, but it may not be altogether impossible. Perhaps someday our rovers will deploy duck-sized moth bots for better reconnaissance on other worlds.
The Solar Impulse airplane flies over the Golden Gate Bridge on April 23, 2013. Credit: Solar Impulse.
The world’s first solar-powered plane is stretching its wings over the US. Today it took off from Moffett Field in Mountain View, California — the home of NASA’s Ames Research Center – and flew to San Fransisco, soaring over the Golden Gate Bridge.
Starting on May 1, Solar Impulse will fly across the US to New York, making several stops along the way as a kind of “get to know you” tour for the US while the founders of Solar Impulse, Swiss pilot Bertrand Piccard and and pilot Andre Borschberg, want to spread their message of sustainability and technology. You can read about the cross-country tour here on UT and also on the Solar Impulse website. You can follow Solar Impulse’s Twitter feed for the latest news of where they are.
A production of the time machine from H.G. Wells' famous story. Via the Austin, Texas Library.
An interesting news item from Iran’s Entkhab news agency: Iranian scientist Ali Razeghi – who is also the managing director of Iran’s Center for Strategic Inventions — has registered a new invention of his own making: a time machine.
It’s doesn’t actually take anyone to the past or future, but produces printed reports with details about the future, and can “predict five to eight years of the future life of any individual, with 98 percent accuracy” according to Razeghi, as quoted in The Telegraph.
“My invention easily fits into the size of a personal computer case and can predict details of the next 5-8 years of the life of its users,” he says. It will not take you into the future, it will bring the future to you.”
Razeghi, 27, says he has been working the project for 10 years and this is the 179th invention he has registered.
The “time machine” would be a good resource for governments, he said, but he doesn’t want to launch a prototype at this point because “the Chinese will steal the idea and produce it in millions overnight.”
Razeghi said his latest project has been criticized by friends for “trying to play God” with ordinary lives and history. “This project is not against our religious values at all,” Razaghi was quoted. “The Americans are trying to make this invention by spending millions of dollars on it where I have already achieved it by a fraction of the cost.”
@doug_ellison's contribution to the new 'Robot Shaming' Tumblr site.
Oh, those space robots. They don’t always do what we want them to do, but we love them anyway. If you need a fun diversion in your day, a new Tumblr site has arisen to call out the robots who have made mistakes. Called “Shaming Robots” it started innocently with an image posted of the engineering model of the Curiosity rover blaming the engineering Opportunity rover for messing up JPL’s Mars Yard. There’s now pages of shamed robots (both space and Earth-based). Submit your own if you have a robot you’d like to shame. You can also follow the fun discussion on Twitter at the hashtag #robotshaming.
Astronomer Alex Parker stared the ‘Robot Shaming’ meme with this image of the engineering model of Curiosity at JPL.